��ϸ����
SystemModeler 13��һ��ҵ�ڶ����ϵͳģ�ͷ���ƽ̨�������ڸ�ƽ̨�ǻ���Modelica���Կ�����Ҫ֪���������ǽ�ģ�����桢��������ר����������ԣ���˱�����Ҳ�̳��˸����ƣ����ṩǰ��δ�еĻ���ͼ�ν�ģ�ͷ��滷������������Ĺ�������Ŀ������û����Զ��壬����Ը�����ľ��彨ģ����Ͳ�ͬ�����������Զ��幤������Ϊ�ؼ��Ļ�����������Modelica���Զ�������ͼ�λ����棬�������ֱ�ۣ�������ʵʱ����ͼ�λ�3D��ģ�����桢�ĵ������������������Զ����ɲ��������棡������ˣ�ȫ�µ������汾�����ϵͳ���ĵ�·ģ��ģ����Զ��幦�ܽ�����Ԥ�����ã�����Խ���ģ�����������Ϣ���п��ٽ�ģ��������з�����ƣ��ù��������ڻ�е�������ѧ������������ϵͳ���������˵Ӧ�÷dz��㷺����Ȼ���㻹���Բ��ü��ϷŲ���������ģ�ͣ���ɽ�����������Ĺ�����ģ�ͽ����ģ������Զ�ģ�ͽ��в���������ɶ�����з��棬Ϊ�����IJ�Ʒ���������ṩǿ���˵����ݻ�����������Ϊ��Ҵ����ı���SystemModeler 13�����ƽ�棬����Ҫ������ǧ��Ҫ����������ӭ����Ҫ������ǰ��������أ�
��װ�ƽ�̳�
1���ڱ�վ���غ����ݰ�����н�ѹ�õ���װ����“SystemModeler_13.0.0_WIN.exe”�����˫�����н��밲װ��ѡ��“English”���ݲ�֧�ּ������ģ�
2��ѡ��װλ�ã�Ĭ��·��Ϊ“C:Program FilesWolfram ResearchSystemModeler 13.0”��������ò�Ҫ��װ��ϵͳ�̣�C�̣�
3��������װ��ҪһЩʱ�������ĵȴ�����
4������װ�������Ȳ�Ҫ�������������“finish”�˳���װ��
5�������������뼤��ڣ����“other ways to activate”���������ʽ��
6��ѡ��ڶ����ֶ�����ѡ��
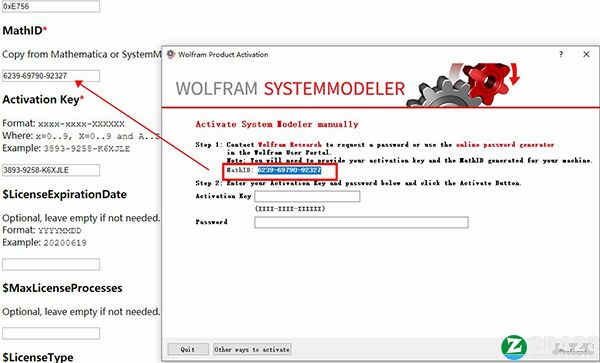
7������ע���ҳ��“keygen.html”���������е�MathID���Ƶ���Ӧ���������
8�����ҳ���·���Generate��������password���ٽ��������password�����������ļ�����У����“Activate”
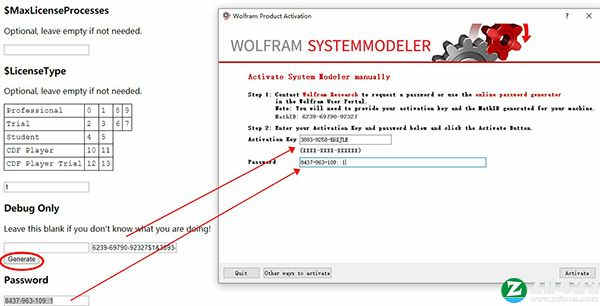
9����������������ɿ�ʼ���ʹ�ÿ����ƽ���ɣ�

�¹���
һ��ģ�Ϳ���
ʹ�����õĿ��Զ���ͼ���б�Ϊ����ģ�ͺͿⴴ����ȷ����ۡ�?
ͨ��������ʹ��������ʽ���û��������������ģ�����ԣ�ģ�����ģʽ�����ӷ�����?
����ģ�͵�Ĭ�Ϲ���ģʽ��ֱ����ת���ĵ���ͼ����ģ�ʹ��롣?
Ϊ���������κε�λ������ģ�ͺ�ģ����ʹ�����ǡ�?
�����Ķ���ģ�ʹ��룬��������ע�͵Ļ��к��л���?
�Ľ��˸������ӵĹ������̡�
�������ӺͲ���
֧������FMI���ĵ���͵���������������ģ�Ͳ�������һ�ٶ��ֹ��߹�ͬģ�⡣?
���κ�ģ�ͣ�ģ���ο�ҳ��ֱ����ת��ģ�ͷ�����
����ģ�������
SystemModeler 13��Wolfram����������ѭ��ͬ�İ汾�š�
ͨ�����㷺��֧�֣����õ����ܺ���Ŀ��ƣ�����ظĽ��˷������Ի���?
����ģ�͵ļ�ģ�ͳ�ʼ����
����ģ�ͣ��˽�ģ����Ϊ��ʹ�ù�ʽ�������������ƿ����
������ɫ
1��֧��FMIЭͬ���浼���͵��롣���ŸĽ���״̬ѡ���㷨
2��quation������������ڵ��Ժ�����ģ��
3��������ģ��ʱ�ɹ�ѡ���Ĭ��ͼ��������б�
4��ͨ���Ҽ�������������ʽ���ɽ��ú�����ģ���е����
5���ܹ�ѡ���ģ��ʱ��ʾ����ͼ��ͼ����ͼ�꣬�ı����ĵ���
6���ܹ������Զ��嵥λת��
7��Modelica�ı���ͼ������װ�͵���ע�͵������л�
8���Ľ��������ߵ�·�ɺͱ༭����������ʱ����ʾ�������
9��������������ʱ�Ľ��Ĺ������̡����Ÿ�������ʾ�ͱ༭ͼ����ͼ������
10���ܹ����ɵؽ�ģ�ʹ�SystemModeler 13���Ƶ�Wolfram���������Ʒ��
11���Ľ���Wolfram�����еķ������Ի��� �汾����Wolfram���Ե�ͬ��
ʹ�ð���
һ������-A�ŷ�����
1��ֱ�����
��1���ܿ�ֱ���綯���ļ�̬ģ�Ͱ����ɱ��ѹԴ����������������ͱ�ʾ��DC�綯���еĴų��ṩ�ĵ��ܺͻ�е��֮�����ϵĵ綯��Ԫ���� ���������ת��������Ա�ʾ��������Щ�����������SystemModeler 13������Modelica�������ҵ��� ���Ϸŵİ����£����ǿ��������ģ��
��2��Ҫ������ģ�ͣ�������Ҫ����һ����ģ�ͣ��ҵ��ʵ��������������Ϸŵ�ͼ���������ʹ�������߹������������
�������ȴ���һ����ΪDCMotor����ģ�͡����ǽ�ʹ�õ������������Modelica�������ҵ���Ҫ�ҵ���������ǿ����������ǣ������������֪�����ǵ�ȷ��λ�ã�������������д������ǵİ������ǽ�չʾ������������㡣 Ҫ�ҵ�StepԴ��������ǽ�ʹ�������������������������������ı����м��벽�裬���ȴ�������֡�
2��ʹ��ModelCenter�е����������������Դ�����
��Ӧ������������п���“����”��ǰ10��ƥ�������Ҫʹ�õ������Modelica.Blocks.Sources.Step���
Ҫ����������ӵ����ǵ�DCMotorģ�ͣ��뽫�������������Ϸŵ��ര�ڵ�DiagramView�С�
�źŵ�ѹ���λ��Modelica.Electrical.Analog.Sources���С�������֪�������ȷ��λ��ʱ�����ǽ�ʹ���������������ͼ���������ķ�֧һֱչ������ʾ������ڵİ�Sources�ķ�֧��
������չModelica���������ͨ��������ͼ����������ķ�������ɡ�
3���������������չModelica����
����������Modelica���а���������� ���ǽ�������չElectrical��װ��Ȼ����Analog��װ�������Sources��װ�����ǽ��������ҵ��źŵ�ѹԪ����
4����չModelica.Electrical.Analog.Sources����
��SignalVoltage������ӵ�DCMotor�������ǽ����϶����ര�ڵ�Diagram View�С����������Ѿ��������߸�����е������� �����ĸ�����Ԫ�������裬��У��ӵغ�EMF��������Modelica.Electrical.Analog.Basic���������ҵ��� ���������Ѿ���չ��Modelica.Electrical.Analog�������ǿ��������ҵ�Basic�������������չ�Բ���ʣ��������
5����չModelica.Electrical.Analog.Basic����
������Ԫ�����ӵ�DCMotorģ�ͺ�ֻʣ��һ��Ҫ���ӵ�Ԫ���������ԡ� ��λ��Modelica.Mechanics.Rotational.Components���С� ������ͨ��չ��Modelica��Mechanics��Rotational��Components����ѡ���Ƿ�Ҫ��������ֱ���������
���ӹ�����������ֱ�����ģ�������ȫ������������������� ʹ�������߹������������
����ģ�����Ĺ������е������߹��ߡ�
1�����磬Ҫ���������ӵ��źŵ�ѹ�����ĸ������ţ��뽫�������ڽӵ������Ϸ�����ס��������Ȼ��ס����꣬ͬʱ��������ƶ����źŵ�ѹ�����ĸ������š� Ҫ�������ӣ����ͷ���갴ť�������������������ֱ��DCMotor��Diagram View�����ڱ��µĵ�һ��ͼ����ɾ�����������ʱ��Model Center�������������Ӧ��Modelica���롣 �л���Modelica�ı���ͼ�Բ鿴ģ�͵��ı���ʾ�� ��ģ�͵��ı���ʾ�У�����ÿ������������������֮���ÿ�������ɷ���ʽ�����е����ӷ��̱�ʾ��
2�������͵�ʽ��˳��ȡ������ɾ������ͽ������ӵ�˳�� ��ˣ������ͷ��̵�˳�����������ģ�������в�ͬ�� ���⣬Ϊ�˱����Ķ�������ͼ��ע�Ͷ��Ѵ������DCMotor������ɾ����
DCMotorģ��������ɣ����Խ���ģ�⡣ ���ǣ����ȣ�����Ҫָ��ijЩģ�����á� ������������“ģ����”��ť�Աߵ����¼�ͷ��Ȼ��ѡ��“ʵ������”�� �ڵ�����“������”�Ի����У�ͨ���༭“ֹͣʱ��”��ģ��ʱ������Ϊ25�롣 ����“ȷ��”��Enter��������Ӧ����ģ�ͣ����Զ������ı���ͼ�е�ʵ��ע�͡� ���ڵ����������е�“ģ����”��ť�Դ�ģ�����IJ�ģ��ģ�͡�
3��ʹ��Ĭ�ϲ���ֵ����DCMotorģ�͵�inertia1.w��signalVoltage1.v��
������ǵõ������ʹ��inertia1.w��signalVoltage1.v��ʱ��Ĺ�ϵͼ��
���IJ���ֵҲ��������ϵͳ��Ϊ�� ���ǽ��ı�������ĵ��裬������ĵ�к��Ծأ��Բ��������Ծ��Ӧ��������Ծ��Ӧ��
�л���ʵ��������е�“����”��ͼ�� Ҫ��“����”��ͼ�б༭����ֵ����˫����ǰֵ�� ������1�ĵ�������Ϊ10ŷķ�����1�ĵ�������Ϊ0.1 H�����Ծ�1����Ϊ0.3 kgm��
�ٴ�ģ��ģ�Ͳ��о����Խ��ٶȵĸ������ߡ�
ʹ���Զ������ֵ����ֱ�����ģ�͵Ĺ���1.w���źŵ�ѹ1.v��
�������Ժ�����
1���ڱ����У����ǽ����ȿ���һ��������ģ�ͣ�ͨ������������ʾ�Ľ�ԾŤ�����о����Ծ��Ӧ����ͨ���ڸ�����ģ���а��������������չʾ��θ���ȷ�ؽ�ģ�ᡣ�������ȿ���������ģ�͡� ͨ���������������չModelica.Blocks.Sources��Modelica.Mechanics.Rotational.Sources��Modelica.Mechanics.Rotational.Components���������ҵ�ģ�͵������Step��Torque��Inertia��IdealGear���� ����ֻ���������ǡ� ������Ϊģ��ָ��������κ����ơ� ��ģ�͵IJ�ͬ��Ҳ����IntroductoryExamples.MultiDomain�����ҵ���ͨ��ѡ��idealGear1��������ǿ�����λ�ڱ༭���ײ���Parameters��ͼ�б༭����IJ�����
2����Model Center�б༭�����������Ĵ����ȡ�
�����ʲ�����ֵ3.����ζ�ŽǶȺͽ��ٶȱ��Ŵ�����������Ť�شӳ��ֵ�һ�ൽ��һ��˥�������� ���⣬ͨ��������startTime��ֵ����Ϊ1�������IJ���Դ�Ŀ�ʼʱ�䡣
��ģ��ϵͳ6������ǹ۲쵽�㶨��Ť�ص��º㶨�ĽǼ��ٶȣ������ٶȵ�б�º���ĽǶȵķ�������
3������IntroductoryExamples.MultiDomain.StiffAxisģ�͵�Ť�أ����Խ��ٶ�2���Խ�2��
ͨ��������������㣬���Ը���ȷ�ؽ�ģ�ᡣ ������ͼ��ͨ������Ťת�������ӵ�������ת������ɵ�ģ�ʹ���������ģ�ͣ�����ʵ����һ�㡣 Ťת���ɿ���Modelica.Mechanics.Rotational.Components�����ҵ���
4��IntroductoryExamples.MultiDomain.WeakAxisģ�͵�Diagram View��
�������1������Ϊ1 kgm��������2����3������Ϊ0.5 kgm�� spring1�ĵ��ɳ����趨Ϊ5 Nm / rad�� ���ǽ�ģ�����ϵͳ6�벢�о�����������ģ��� ��ע�⣬����3��������֮ǰ�Ĺ���2����������һ��Ԫ�أ������ѡ���Ļ�ͼ����������IntroductoryExamples.MultiDomain.WeakAxisģ�͵�Ť�أ����Խ�3���Խ��ٶ�3��
����ģ�ͺ�����ģ��֮��ıȽϱ������DZ������ƣ���ǰ�߾������ӵ�ƫת��
�ٶ����̵�ַ��ȡ�룺szgy